Description

LE PONT : Système Didactique Sciences de l’Ingénieur
L’original:

Le pont Chaban-Delmas inauguré en 2013 permet de boucler les boulevards urbains de Bordeaux, en reliant les quartiers Bacalan et Bastide.
Long de 433m, il comporte 2 voies de transports en commun, 4 voies pour véhicules routiers, et 2 passerelles pour cycles et piétons.
Les travées fixes sont réalisées à partir de poutres métalliques sur piles béton.
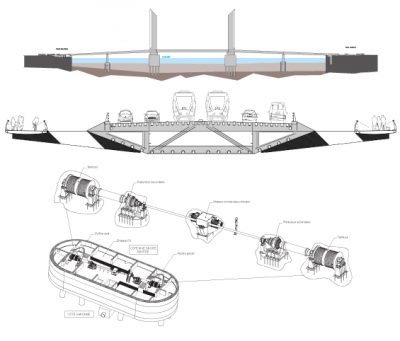
4 pylônes béton de 75m de haut permettent le levage de la travée centrale (longueur 117m) afin d’offrir 50m de tirant d’air aux bateaux navigant vers le centre historique.
 La travée levante de 2700 tonnes réalisée en caisson métallique est équilibrée par 4 contrepoids de 640 tonnes chacun.
La travée levante de 2700 tonnes réalisée en caisson métallique est équilibrée par 4 contrepoids de 640 tonnes chacun.
Elle est actionnée par 2 moteurs de 132kW synchronisés, et peut être levée en charge en 12 min.
La hauteur de la travée levante est contrôlée par un capteur dans chaque pylône.
Le poste de commande situé sur la rive gauche permet de contrôler la circulation, activer les moteurs et surveiller le passage des bateaux.
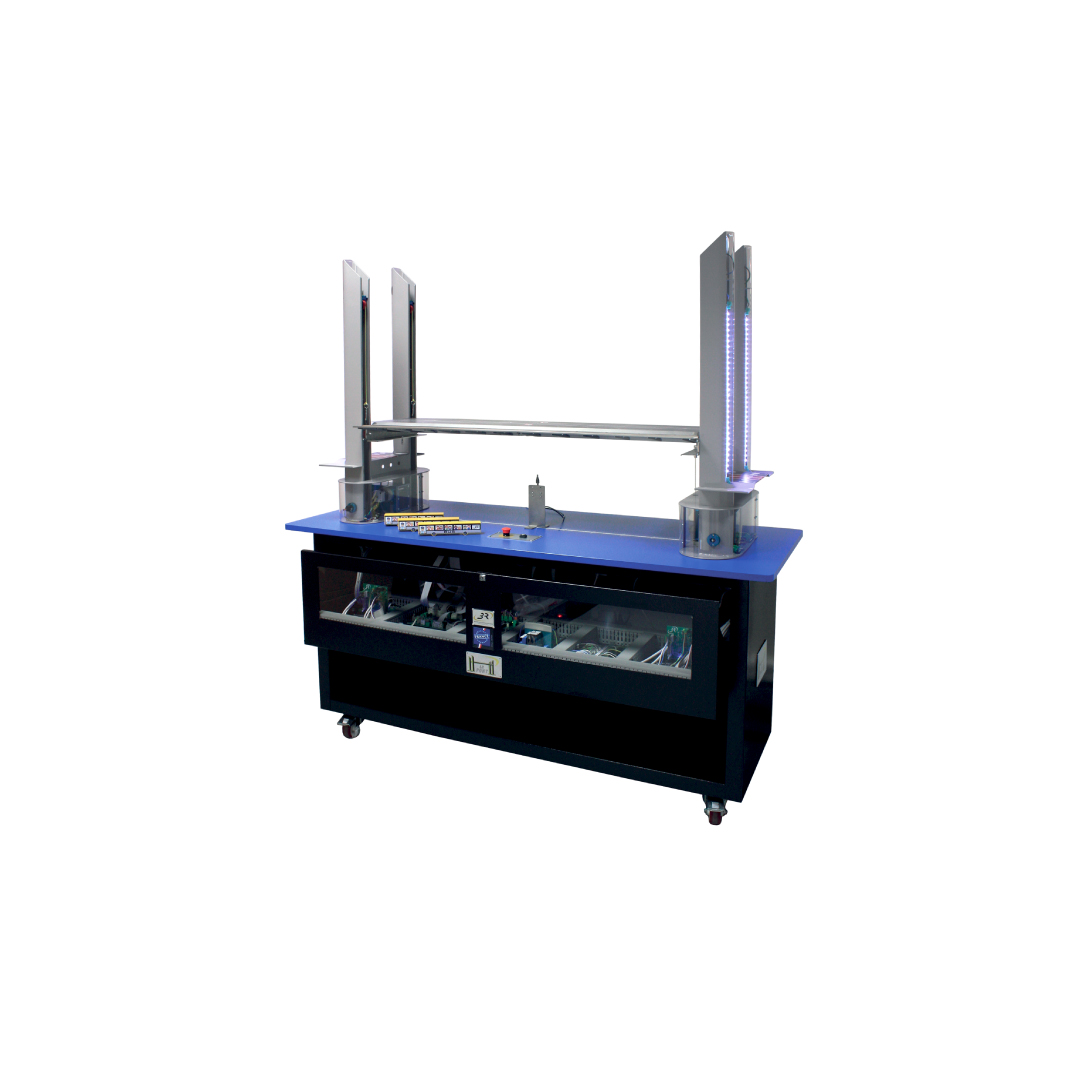
La maquette de Génie Civil :

La Structure
Maquette au 1/100ème
- Structure des piles du pont en acier laqué d’épaisseur 1.5 mm fermée par polycarbonate pour visualisation des câbles et contrepoids
- Poulies et contrepoids dans chaque pile avec câble en kevlar
- Repérage des câbles par couleur : jaune pour le levage, bleu pour le rappel
- Bases des piles du pont composées de moteur et motoréducteur puissance 25 W
- Treuil d’enroulement des câbles avec gorge de trancanage
- Tablier en caisson acier épaisseur 0.5 mm
- Montage du pont sur armoire à roulettes
Instrumentation: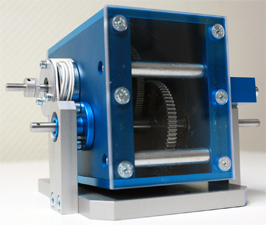
- 1 capteur potentiométrique pour mesure de flèche
- 4 Capteurs d’effort sur poulies
- 3 Codeurs incrémentaux
- 4 Capteurs de force tablier
- 2 Capteurs de hauteur du tablier (capteurs à câbles)
- 4 Capteurs de courants consommés
- 2 mesure de tension d’alimentation
Les Activités :
A/ Activité « MATIERE »
Géométrie de la travée levante :
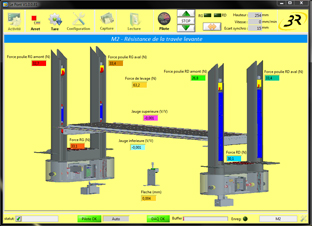
Résistance de la travée levante :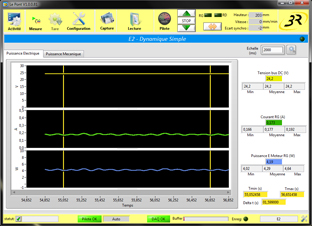
-
Étude de la déformation du tablier en charge, avec différentes masses.
-
Mesure de la flèche, calcul de la contrainte du tablier sous charge
Résistance des câbles de levage :
- Étude de la répartition des efforts dans les câbles permettant le levage du tablier.
B/ Activité « ENERGIE »
Cinématique de la transmission :
- Étude des mouvements de levage du tablier : câbles, poulies, rotation du tambour d’entraînement, déplacement du tablier…
Dynamique simple :
- Étude du bilan simplifié de puissance du levage de la travée sous charge.
Efforts à vitesse constante :
- Étude du bilan de puissance détaillé du levage de la travée sous charge.
Efforts en mouvement accéléré :
 Étude dynamique du levage de la travée sous charge.
Étude dynamique du levage de la travée sous charge.
Moteur BLDC :
- Étude de la commutation électronique d’un moteur sans balais en fonction de l’information du codeur.
Frottement :
- Bilan de puissance du réducteur en présence de frottements secs et visqueux.
C/ Activité « INFORMATION »
Codeur incrémental :
- Étude d’un dispositif digital de mesure de la position et de la vitesse en rotation.
Capteur à jauges :
- Étude d’un dispositif analogique de mesure des petits déplacements
Codeur absolu :
- Étude d’une liaison série synchrone.
Bus de terrain :
- Étude d’une liaison série asynchrone.
Synchronisation :
- Programmation de la régulation de vitesse des piles pour synchroniser les mouvements des deux rives.
Contrôle d’éclairage du pont :
 Programmation des couleurs et de l’intensité des LED d’éclairage
Programmation des couleurs et de l’intensité des LED d’éclairage
Lecture de codeurs :
- Programmation du décodage des signaux codeurs sur un micro contrôleur.
Capteur tachymétrique :
- Synthèse du filtre d’un capteur tachymétrique et étude des caractéristiques du signal obtenu.